9.2 KiB
RMT-PPAD: Real-time Multi-task Learning for Panoptic Perception in Autonomous Driving
This repository is the official PyTorch implementation of the paper "RMT-PPAD: Real-time Multi-task Learning for Panoptic Perception in Autonomous Driving".
RMT-PPAD: Real-time Multi-task Learning for Panoptic Perception in Autonomous Driving
by Jiayuan Wang, Q. M. Jonathan Wu 📧, Katsuya Suto, and Ning Zhang
(📧) corresponding author.
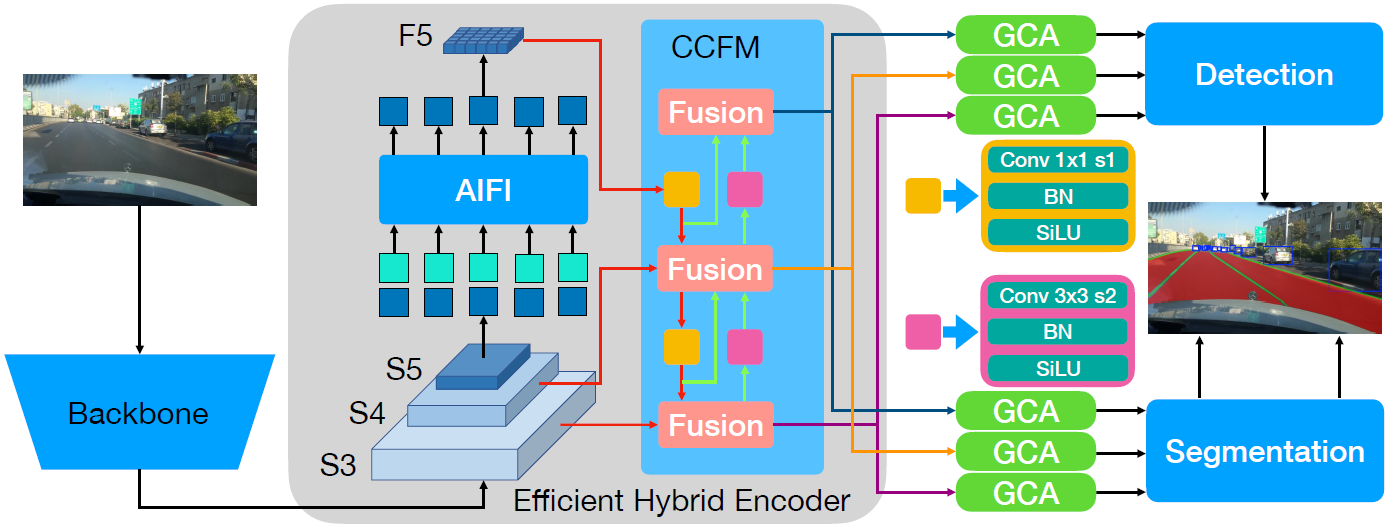
The Illustration of RMT-PPAD
Contributions
- We design a real-time transformer-based multi-task model (RMT-PPAD) without bells and whistles that jointly addresses object detection, drivable area segmentation, and lane line segmentation in a single network.
- We propose a lightweight GCA module, which extracts task-specific features, retains shared representations, and adaptively fuses them to alleviate negative transfer between tasks.
- We design an adaptive segmentation decoder that learns task-specific weights for multi-scale features automatically. This eliminates the need for manually designed task-specific structures while balancing fine details and global context.
- We identify the inconsistency between the lane line label widths used for training and testing in previous works. For a fair and true reflection of the model’s lane line segmentation performance, we propose a simple yet effective method to dilate the test label widths to the same as the train dataset.
- We conduct extensive experiments and ablation studies on the BDD100K dataset and real-world driving scenarios to validate the effectiveness of RMT-PPAD, which achieves SOTA performance across all tasks compared to open-source MTL models for panoptic driving perception.
Results
Quantitative results comparison of RMT-PPAD and open-source MTL models on BDD100K
| Model | FPS | Params (M) | Object Detection | Drivable Area | Lane Line | ||
|---|---|---|---|---|---|---|---|
| Recall (%) | mAP50 (%) | mIoU (%) | IoU (%) | ACC (%) | |||
| YOLOP | 64.5 | 7.9 | 88.5 | 76.4 | 89.0 | 44.0 | 79.8 |
| HybridNet | 17.2 | 12.8 | 93.5 | 77.2 | 91.0 | 52.0 | 82.7 |
| YOLOPX | 27.5 | 32.9 | 93.7 | 83.3 | 90.9 | 52.1 | 79.1 |
| A-YOLOM(n) | 52.9 | 4.4 | 85.3 | 78.0 | 90.5 | 45.6 | 77.2 |
| A-YOLOM(s) | 52.7 | 13.6 | 86.9 | 81.1 | 91.0 | 49.7 | 80.7 |
| RMT-PPAD | 32.6 | 34.3 | 95.4 | 84.9 | 92.6 | 56.8 | 84.7 |
Ablation study on MTL and GCA
| Methods | Recall (%) | mAP50 (%) | mIoU (%) | IoU (%) | ACC (%) |
|---|---|---|---|---|---|
| Object only | 92.1 | 77.5 | – | – | – |
| Drivable area only | – | – | 91.0 | – | – |
| Lane line only | – | – | – | 53.2 | 85.3 |
| Segmentation only | – | – | 91.3 | 53.3 | 85.4 |
| vanilla MTL | 92.4 | 76.9 | 91.0 | 52.4 | 83.6 |
| MTL with GCA (RMT-PPAD) | 92.1 | 78.3 | 91.3 | 52.7 | 84.1 |
Ablation Studies for segmentation performance at different confidence thresholds on toy and BDD100K.
mIoU for drivable area segmentation; IoU and ACC for lane line segmentation.
| Threshold | Toy | BDD100K | ||||
|---|---|---|---|---|---|---|
| mIoU (%) | IoU (%) | ACC (%) | mIoU (%) | IoU (%) | ACC (%) | |
| 0.40 | 91.3 | 48.8 | 88.9 | 92.6 | 53.7 | 89.4 |
| 0.45 | 91.3 | 49.2 | 88.7 | 92.6 | 54.0 | 89.1 |
| 0.50 | 91.1 | 49.6 | 88.4 | 92.4 | 54.3 | 88.9 |
| 0.55 | 90.9 | 50.0 | 88.2 | 92.1 | 54.6 | 88.7 |
| 0.60 | 90.4 | 50.3 | 87.9 | 91.7 | 55.0 | 88.4 |
| 0.65 | 89.8 | 50.6 | 87.5 | 91.0 | 55.2 | 88.1 |
| 0.70 | 89.0 | 51.0 | 87.2 | 90.3 | 55.5 | 87.7 |
| 0.75 | 88.1 | 51.4 | 86.7 | 89.5 | 55.9 | 87.3 |
| 0.80 | 87.1 | 51.8 | 86.2 | 88.5 | 56.3 | 86.8 |
| 0.85 | 85.9 | 52.3 | 85.4 | 87.4 | 56.6 | 86.0 |
| 0.90 | 84.2 | 52.7 | 84.1 | 85.9 | 56.8 | 84.7 |
| 0.95 | 80.9 | 52.1 | 81.0 | 83.4 | 55.8 | 81.5 |
Notes:
- The works we have used for reference include
YOLOP(paper,code),HybridNets(paper,code),YOLOPX(paper,code),A-YOLOM(paper,code). Thanks for their wonderful works.
Visualization
Real Road

Requirement
This codebase has been developed with Python==3.8.19 with PyTorch==2.4.1.
cd RMT-PPAD
conda env create -f environment.yml
conda activate RMTPPAD
cd ultralytics
Data preparation and Pre-trained model
Note:
Since we extended the label size for lane line testing, please use our provided dataset to reproduce the results reported in the paper. Further details are described in the paper.
Download
-
Download the images from images.
-
Pre-trained model: RMT-PPAD.
-
Download the annotations of detection from labels.
-
Download the annotations of lane line segmentation and drivable area segmentation from mask.
We recommend the dataset directory structure to be the following:
├─dataset root
│ ├─images
│ │ ├─train2017
│ │ ├─val2017
│ ├─labels
│ │ ├─train2017
│ │ ├─val2017
│ ├─mask
│ │ ├─lane
│ │ │ ├─train2017
│ │ │ ├─val2017
│ │ ├─drivable
│ │ │ ├─train2017
│ │ │ ├─val2017
Update the your dataset path in the ./ultralytics/datasets/bdd-multi.yaml.
Training
You can set the training configuration in the ./ultralytics/yolo/cfg/default.yaml.
python train.py
You can change the setting in train.py
Evaluation
You can set the evaluation configuration in the ./ultralytics/yolo/cfg/default.yaml
python test.py
You can change the setting in test.py
Prediction
python predict.py
You can change the setting in predict.py
Citation
If you find our paper and code useful for your research, please consider giving a star ⭐ and citation 📝 :
@ARTICLE{2025arXiv250806529W,
author = {{Wang}, Jiayuan and {Wu}, Q.~M. Jonathan and {Suto}, Katsuya and {Zhang}, Ning},
title = {RMT-PPAD: Real-time Multi-task Learning for Panoptic Perception in Autonomous Driving},
journal = {arXiv e-prints},
keywords = {Computer Vision and Pattern Recognition, Machine Learning},
year = 2025,
month = aug,
eid = {arXiv:2508.06529},
pages = {arXiv:2508.06529},
archivePrefix = {arXiv},
eprint = {2508.06529}
}